
Von der Punktwolke zum 3D-Druck
Objektrekonstruktion mit RGB und Tiefenkamera, Mesh-Processing und Druckvorbereitung

Tiefenkameras wurden ursprünglich zur Bewegungserkennung als natürliche Interaktion zwischen Mensch und Computer eingeführt. Für den Nahbereich sind die Modelle von Primsense, Microsoft und Asus verfügbar, die alle mehr oder weniger baugleich sind und auf der PrimeSense 3D-Sensor-Technologie basieren. Die Kamerakomponenten sind ein Infrarotsensor, eine Infrarotkamera und eine RGB-Kamera. Audiokomponenten werden hier nicht betrachtet. Der synchronisierte Ausgabestream von Tiefe und Farbinformation wird in die räumlichen Informationen umgesetzt. Der IR-Projektor sendet im nahen Infrarotbereich ein für das menschliche Auge nicht sichtbares codiertes Punktmuster aus. Ein CMOS-Sensor empfängt das von der Szene reflektierte Bild und berechnet, aufgrund des Kameraabstandes über die Parallaxen korrespondierender Punkte, die Tiefenmatrix mit VGA-Auflösung, der ein RGB-Bild zugeordnet werden kann. Die Berechnungen erfolgen mit parallelen Algorithmen auf einem Chip in der PrimeSense SoC Technologie, wodurch der Hostrechner erheblich entlastet ist.
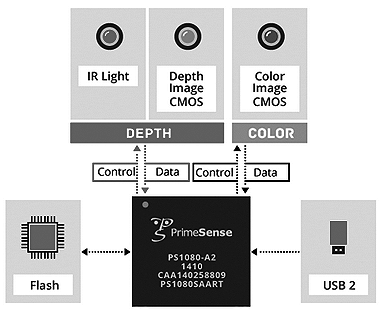
Prinzipschema Carmine Quelle: www.primesense.org
Das Messvolumen für die Primsense Carmine 1.08 wird mit 0,8 bis 3,5 m angegeben, die mittlere Tiefenauflösung beträgt 1,2 cm bei 30 fps. Die Carmine 1.09, für den Nahbereich zwischen 0,35 und 1,4 m konzipiert, wird mit einer mittleren Tiefenauflöung von 0,5 cm angegeben. Mit Capri hat Primesense aber bereits die nächste Generation der Technologie angekündigt. Im Unterschied zur kompakteren PrimeSense und Asus benötigt die Microsoft Kinect für Windows eine eigene Stromversorgung und kann softwaregesteuert geneigt werden. Aber auch hier ist bereits von der Kinect 2 die Rede. Mit dem OpenNI SDK (www.openni.org) steht den Entwicklern Software für Linux, Windows und OSX zur Verfügung, Microsoft unterstützt das Windows SDK.
Anwendungssoftware zum 3D-Scannen ist in Varianten als free oder paid aus dem Internet zu beziehen. Derzeit sind u.a ReconstructMe, Skanect, Scenect von Faro, Brekel Kinect, Kinect Fusion, K3DScan oder Artec Studio für Kinect zu nennen. Beste Hardwarevoraussetzungen sind 64bit Rechner, 8MByte RAM, Cuda 2.0 kompatible Grafikarten für Berechnungen auf der GPU unter Windows ab Version 7. Unter dem Menüpunkt Scannen finden Programme aus dieser Liste Anwendung.
Bildnachweis:
Oben links: Primesense Carmine 1.09 www.primsense.com
Oben rechts: Mirosoft Kinect www.microsoft.com/en-us/kinectforwindows/
Rechts oben: RGB-Bild
Rechts mitte: Tiefenmatrix
Rechts unten: Mesh