
From Point Cloud to 3D Print
Object Reconstruktion with RGB and Depth Camera. Mesh Processing and Printer Pre-processing

Depth cameras were developed for motion detection and as a natural interfaces between human and machine. The models from Primesense, Microsoft and Asus are more or less identical and being based on Primesense sensor technology. The cameras are equipped with an infrared sensor, an infrared projector and a RGB camera. Audio components not of interest in the present context. Depth and color information are synchronised and provide the output stream, transfered to spatial information. A coded point pattern is projected onto the object. The wave length is in the near infrared and not visible for the human eye. Receiver for the reflected image is a CMOS sensor. Depending on the basis between the cameras, parallax values occur and the depth matrix can be calculated with VGA resolution. Computations are provided by parallel algoritms on a chip in Primesense SoC technology, releaving the host computer.
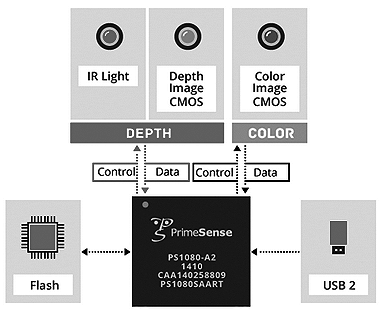
Flow chart Carmine source: www.primesense.org
For Primsense Carmine 1.08 the measurement distance is announced from 0,8 to 3,5 m. Average depth resolution is 1,2 cm at 30 fps. Carmine 1.09 designed for close range measurements between 0,35 and 1,4 m has an average depth resolution of about 0,5 cm. With the new Capri sensor, Primesense announced the next technology generation already. The diffrence between the more compact Primesense and Asus compared to Microsoft Kinect is the external power supply and the motor driven head of the Kinect. The first is a great disadvantage in field operation. Software support is provided by the OpenNI SDK or the Windows SDK for Kinect.
Application software for 3D scanning is available in versions as free or paid. At the time of this writing ReconstructMe, Skanect, Scenect von Faro, Brekel Kinect, Kinect Fusion, KScan3D or Artec Studio for Kinect have to be mentioned. Computer hadware should be 64bit machines, 8 MByte RAM, Cuda 2.0 compatible graphic boards supporting GPU computing and Windows beginning from Version 7. See menu Scannen for more information about the application software.
Pictures:
Top left: Primesense Carmine 1.09 www.primsense.com
Top right: Mirosoft Kinect www.microsoft.com/en-us/kinectforwindows/
Right top: RGB image
Right center: Depth matrix
Right down: Mesh